
Keyhole surgery involves operating through tiny incisions. Although large incisions enable the surgeon to better see and manipulate the pathological tissue, unnecessary damage are often done to the organ causing greater pain to the patient and longer recovery time. There is also a higher risk of complications due to surgical trauma. Thus, the need for Minimally Invasive Surgery (MIS) yields a considerable amount of research in the field of medical robotics.
Figure 1.1, taken from a research thesis, illustrates a novel image-guided system use for minimally invasive neurosurgery. The system consists of a miniature robot holding a mechanical guide for needle or probe insertion. Based on a preoperative CT/MRI image, the robot can automatically positions itself for accurate targeting or path finding along the skull of the patient.
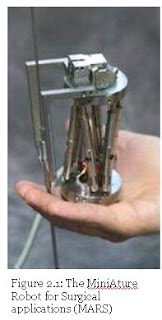
Currently, such a system is still in research or refining stages in neurosurgery and the MARS robot is rather more commonly used in orthopedic procedures. Clearly, the use of miniature robot provides many advantages over existing bulky and expensive robotic system. The miniature robot system has no size and line-of-sight problems and insertion angles are not being restricted as the robot has 6 degree of freedom. Being robust and small, the system is not only more affordable but allows for easy use and change of plans prior to, or even during, the actual surgical operation.
In addition, such a system does not requires immobilisation of the patient as the robot is mounted on the skull is based on a relative reference frame. The mounting frame also provides rigid and robust support for precise guidance of needle insertion.
In the likely future, we shall see the broader use of smaller yet more precise robots in the field of medicine.
U036039B Kim Choon Ming, Alvin
posted by Medical @ 6:50 AM
0 comments
![]()
